
رباتهایی که امروزه کف اقیانوسها را کاوش میکنند، به حرکات از پیش برنامهریزیشده، پردازندههای مرکزی و ساختارهای فلزی سخت وابستهاند. اما دریا محیطی غیرقابل پیشبینی است و این معماری قدیمی هر جا که جریانهای آب تغییر کند یا دید کاهش یابد به مشکل برمیخورد. اکنون محققان مؤسسه فناوری ایتالیا (IIT) برای دورزدن این موانع، رویکردی بسیار متفاوت را در پیش گرفتهاند که طبیعت ۵۰۰ میلیون سال برای تکامل آن زمان صرف کرده است: ساخت یک بازوی رباتیک نرم که رفتار هشتپا را تقلید میکند.
به گزارش نیواطلس، هشتپا یک مغز مرکزی کوچک دارد، اما حدود ۶۰ درصد از نورونهای عصبی آن در هشت بازویش پخش شدهاند. هر بازو میتواند مستقیماً تصمیم بگیرد و کارهایی مانند گرفتن طعمه را در لحظه انجام دهد. محققان ایتالیایی این معماری عصبی را با استفاده از سیلیکون و قطعات الکترونیکی بازسازی کردند.
نتیجه این تلاش، یک بازوی رباتیک نرم به طول ۴۱ سانتیمتر و قطر ۴ سانتیمتر است که ۱۰ مکنده مصنوعی روی آن قرار دارد. این ربات هیچ دوربین، کامپیتور خارجی یا سیستم کنترل مرکزی ندارد و درست مانند یک هشتپای واقعی است. این رویکرد به ربات امکان میدهد تا تماسها را تفسیر کند و چنگزدن خود را بهصورت مستقل، ساده و طبیعی با محیط تطبیق دهد.
سه جفت LED و فوتوترانزیستور در داخل هر مکنده تعبیه شدهاند که تغییرات بازتاب نور را اندازه میگیرند و مانند سیستم عصبی بازو عمل میکنند. وقتی یک جسم با مکنده تماس پیدا میکند، سیستم این تغییر نور را به سه داده مختلف تبدیل میکند: آیا تماسی برقرار شده است؟ با چه شدتی؟ و از چه زاویهای؟
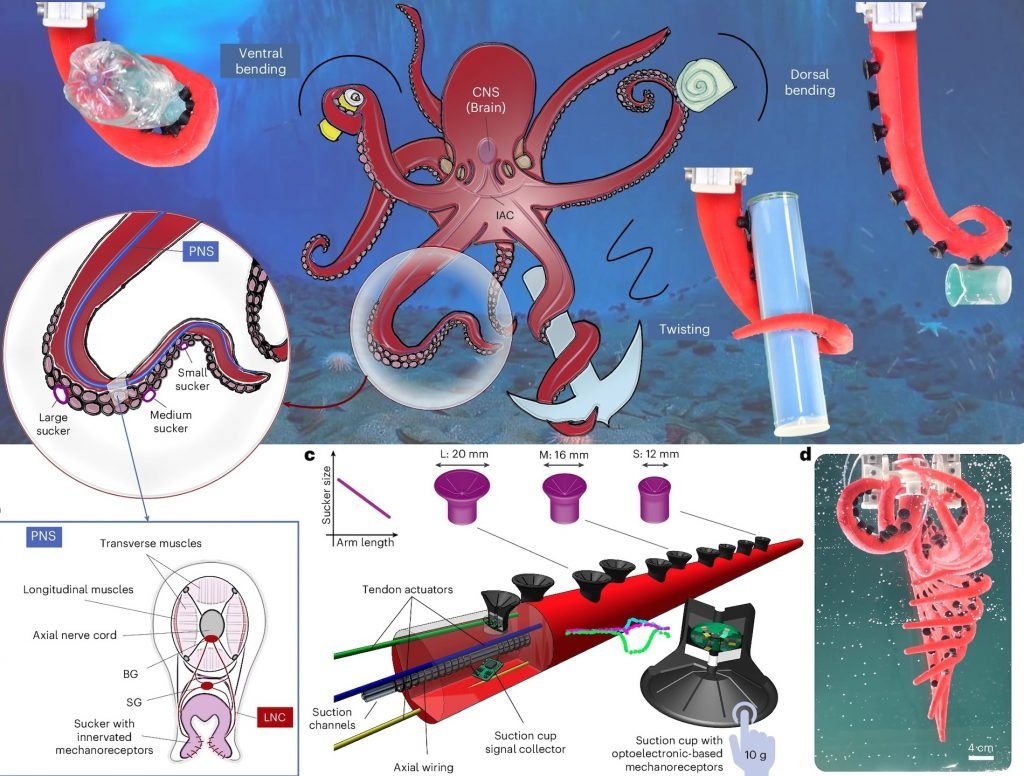
حساسیت این مکندهها به حدی بالاست که حاشیه خطای نیروی آنها فقط ۰.۱ نیوتن (تقریباً معادل وزن چند گیره کاغذ) است. سیستم کنترل این ربات در دو لایه کار میکند. لایه اول محلی است؛ به این معنی که هر مکنده مدار مستقل خود را دارد و بهمحض تشخیص تماس، بدون منتظر ماندن برای دستور، عمل مکش را آغاز میکند. لایه دوم دادههای تمام مکندهها را دریافت میکند، موقعیت جسم را در یک بازه زمانی چهار ثانیهای میسنجد و استراتژی کلی گرفتن جسم (مانند جمعکردن بازو به بالا، پایین یا چرخاندن آن) را تعیین میکند.

محققان تمام آزمایشها را در زیر آب انجام دادند. این بازو موفق شد بطریها و لیوانهای شیشهای را درحال حرکت تشخیص دهد، اشیایی با زاویههای مختلف (از جمله یک ستاره دریایی مصنوعی) را کنترل کند و وزنی حدود ۵۰۰ گرم را بلند کند.
پیشازاین در سال ۲۰۱۷، شرکت آلمانی Festo چنین بازویی ساخته بود که به اپراتور انسانی نیاز داشت. محققان دانشگاه بریستول انگستان نیز رباتی ساختند که مخاط هشتپا را شبیهسازی میکرد تا اجسام زبر را بگیرد. اما آنچه طراحی محققان ایتالیایی را از سایرین متمایز میکند، استقلال کامل آن است؛ این ربات فقط اجسام را نمیگیرد، بلکه با پردازش دادهها تصمیم میگیرد که چگونه آنها را بگیرد. دانشمندان قصد دارند از این بازوی انعطافپذیر و ماژولار برای بازرسی لولههای زیردریایی، کابلها و همچنین جمعآوری نمونههای شکننده بیولوژیکی استفاده کنند.
یافتههای این پژوهش در ژورنال Nature Machine Intelligence منتشر شده است.












